Imitation learning, e.g., diffusion policy, has proven effective in various robotic manipulation tasks.
However, extensive demonstrations are required for policy robustness and generalization.
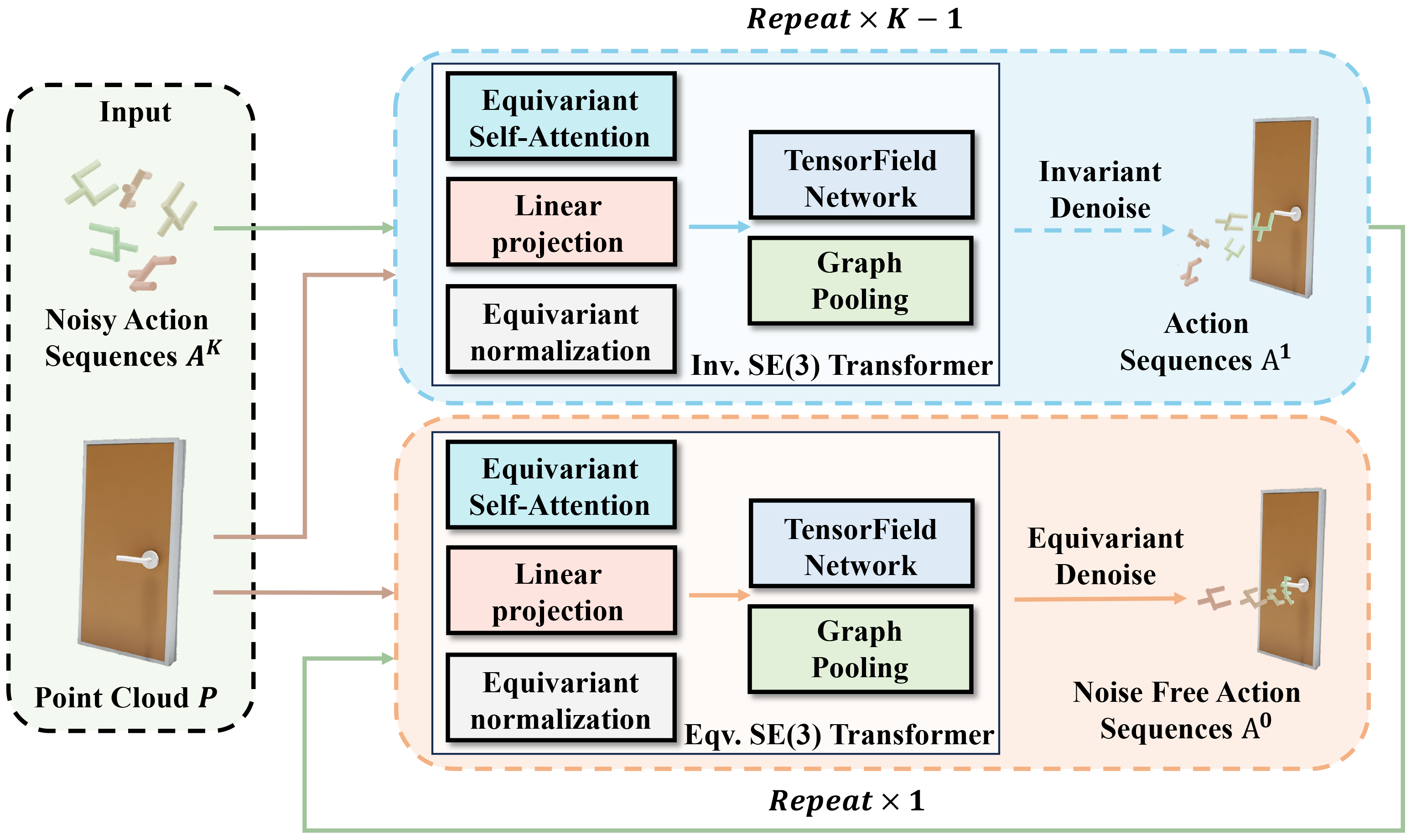
To reduce the demonstration reliance, we leverage spatial symmetry and propose ET-SEED, an efficient
trajectory-level SE(3) equivariant diffusion model for proposing action sequences in complex robot manipulation tasks.
Further, previous equivariant diffusion models require the per-step equivariance in the Markov process,
making it difficult to learn policy under such strong constraints. We theoretically extend equivariant
Markov kernels and simplify the condition of equivariant diffusion process, thereby significantly
improving training efficiency for trajectory-level SE(3) equivariant diffusion policy in an end-to-end manner.
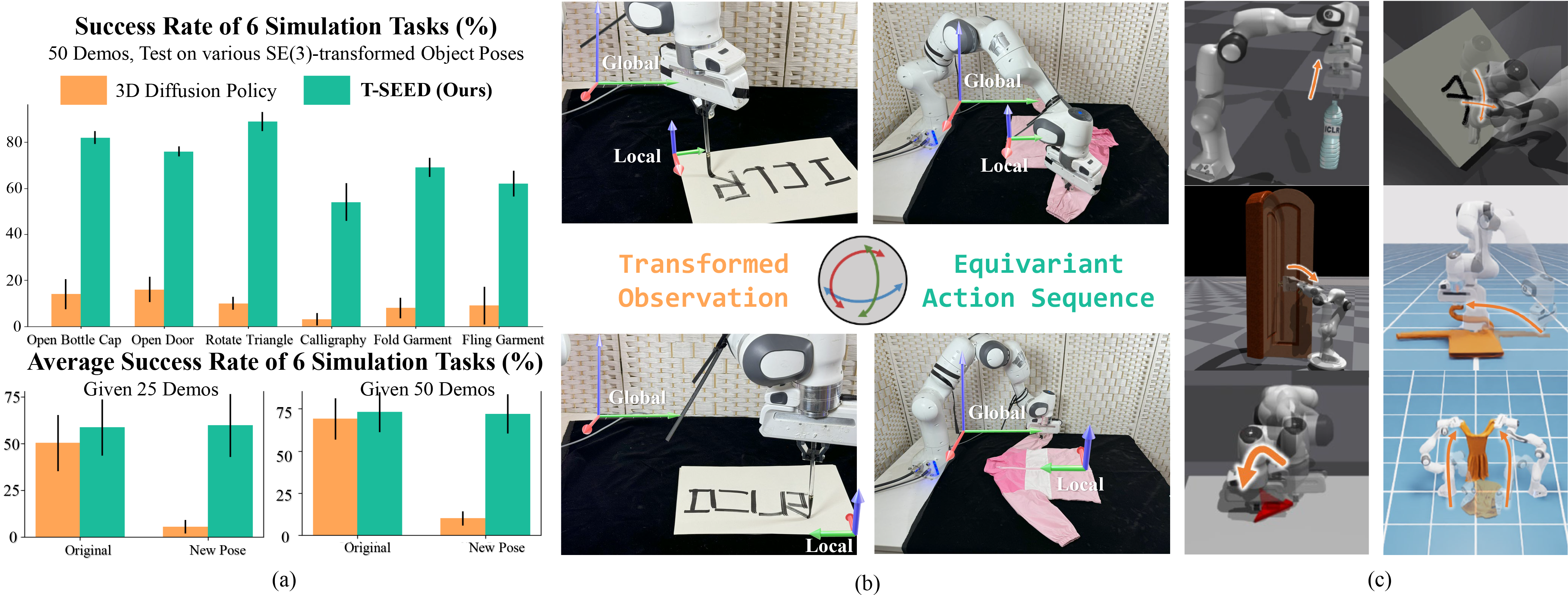
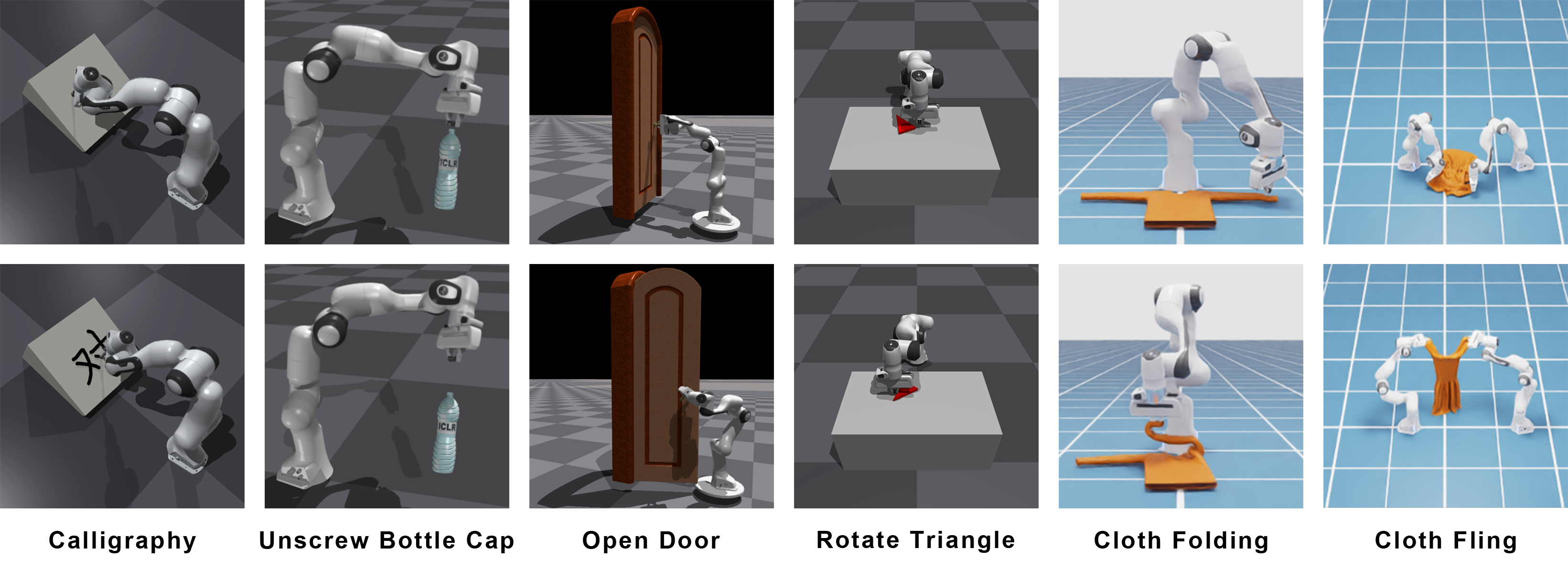
We evaluate ET-SEED on representative robotic manipulation tasks, involving rigid body, articulated and deformable object.
Experiments demonstrate superior data efficiency and manipulation proficiency of our proposed method,
as well as its ability to generalize to unseen configurations with only a few demonstrations.